Resources
White Papers and Application Notes
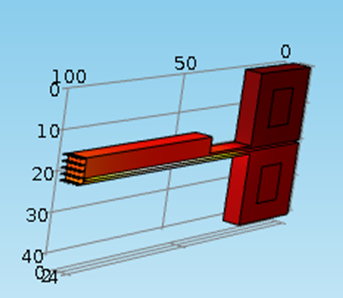
MEMS based Gecko Foot for Micro Robotics
Published in 2015
Gecko foots have inspired researchers to develop designs that can help robots to tread vertically oriented surface. These nanobots find many applications as they can perform a lot of operations more efficiently and also lower the cost of such operations. These can be employed in various fields: medical, industrial etc. Gecko lizards use dry adhesion van der Waals forces to climb walls produced by their spatular stalks attached on setae. The 3D MEMS model of an electrothermally actuated gecko foot is presented in this paper. The working of a single microhair is discussed and the two designs, one with actuation and one without are compared. The simulation results have been calculated using the Joule Heating and Thermal Expansion physics.
Download
- pasumarthy_presentation.pdf - 1.06MB
- pasumarthy_paper.pdf - 0.5MB
- pasumarthy_abstract.pdf - 0.23MB